For an operator to quickly address this challenge, SLB recommended the ReSOLVE Family™ instrumented wireline intervention service active debris removal tool because it provides real-time monitoring, dynamic tool control, and verified performance in well intervention operations.
SLB conveyed a downhole camera to inspect the condition of the fish. Even though the pictures were not very clear because of debris and a thick, dirty fluid, SLB concluded that the fish was free of debris.
While awaiting the ReSOLVE Family active debris removal tool, the operator tried to engage and pull the fish via a spang jar in wireline. However, the pulling tool did not manage to enter the lower completion because of restrictions at the top of the packer.
When the active debris removal tool arrived, the operator switched to the stroker equipped with a grapple at the bottom to ease the entry inside the packer assembly. After several attempts, the tool’s anchor arms were opened to centralize the bottomhole assembly (BHA). In doing so, the BHA dropped into the previous restriction to provide access to the fish.
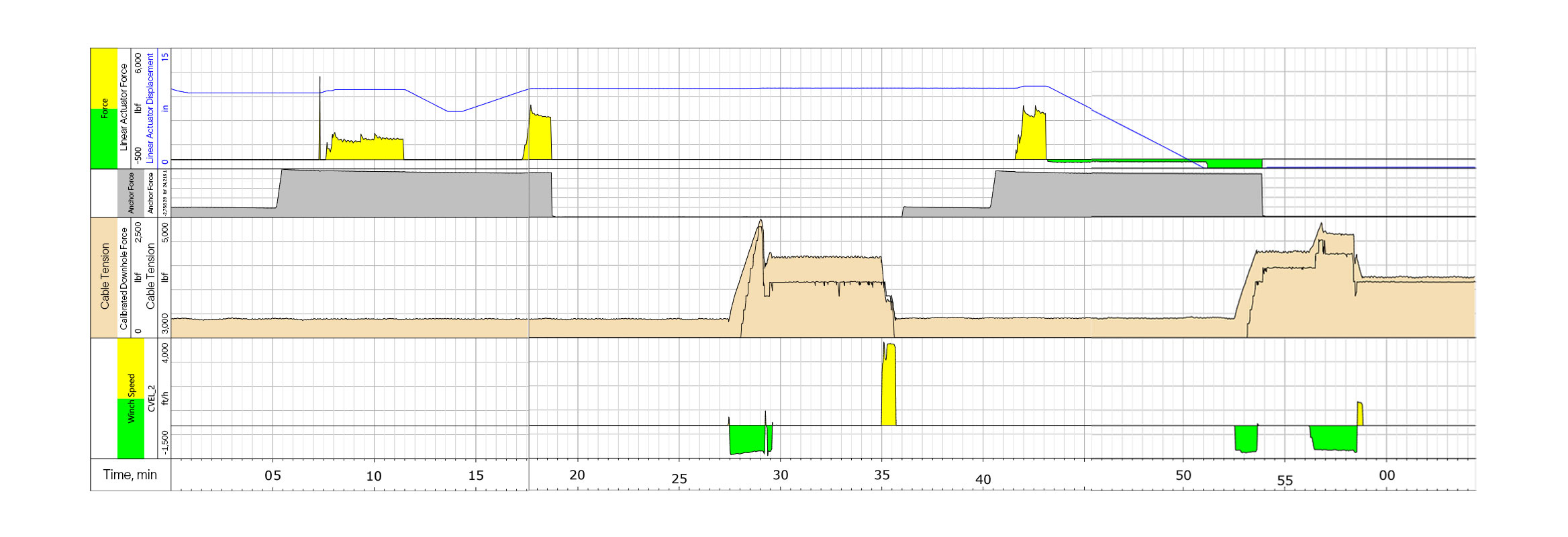
SLB successfully latched onto the fish three times, but each time the fish dropped while the cable was pulled. Thus, the stroking tool was used to push the grapple into the fish with guidance from the ReSOLVE Family anchor–linear actuator force measurements, which adjusted the force gradually to not exceed the completion equipment limitations. Once the stroke measured a 1-in-deeper engagement than previous attempts, the fish was successfully brought to the surface. The tool included two release devices to ensure disengagement from the fish at the conclusion of the operation.
The real-time measurements from the ReSOLVE Family anchor–linear actuator combined with the active debris removal tool were key to confirming that the fish was properly latched, and the fine control of the stroking tool enabled SLB to precisely control the displacement and force to prevent damage to the completion equipment and the ball valve underneath. By using the SLB service and tool, the operator saved three days of rig time by avoiding a drillpipe fishing operation.