High-performance, high-efficiency worm gears
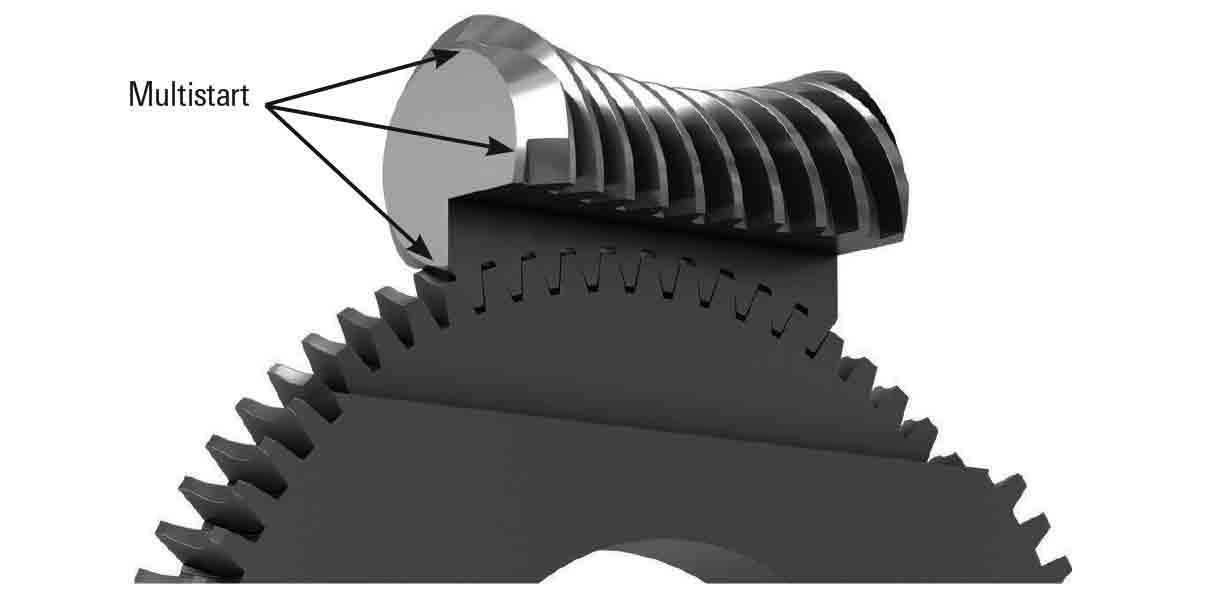
The double-enveloping design of MAXTORQUE high-performance valve products creates multiple start points between the gear wheels, increasing the torque capacity compared with a single-enveloping design. These gears can be easily integrated into an electric actuator package to reduce the required size of the actuator. They also increase efficiency through increased mechanical advantage.
High-performance worm gears offer a simple solution for large, high-pressure valves that are infrequently operated but where timely, safe operation is important, such as pipeline isolation or at pig launchers and receivers. High-performance gear units also carry a distinct advantage in subsea applications fast valve cycling speed is imperative to maximizing diver or ROV productivity.